前列腺炎的治疗费用,胜利油田向浩被杀,木地板招商
利用pcl中分割算法、
pcl::sacsegmentation<pcl::pointxyz> seg;
,不利用法线参数,只根据模型参数得到的分割面片,与想象的面片差距很大,
1 pcl::modelcoefficients::ptr coefficients (new pcl::modelcoefficients ()); 2 pcl::pointindices::ptr inliers (new pcl::pointindices ()); 3 // 创建分割对象 4 pcl::sacsegmentation<pcl::pointxyz> seg; 5 // 可选 6 seg.setoptimizecoefficients (true); 7 // 必选 8 seg.setmodeltype (pcl::sacmodel_plane); 9 seg.setmethodtype (pcl::sac_ransac); 10 seg.setmaxiterations (1000); 11 seg.setdistancethreshold (0.05);
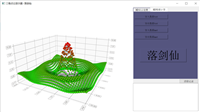
后我采用ransac拟合的方法,进行面片的分割
1 std::vector<int> inliers; //存储局内点集合的点的索引的向量
2
3 //进行ransac平面拟合
4 pcl::sampleconsensusmodelplane<pointt>::ptr model_p(new pcl::sampleconsensusmodelplane<pointt>(cloud)); //针对平面模型的对象
5 pcl::randomsampleconsensus<pointt> ransacp(model_p);
6 ransacp.setdistancethreshold(.1); //与平面距离小于0.1的点作为局内点考虑
7 ransacp.computemodel(); //执行随机参数估计
8 ransacp.getinliers(inliers); //存储估计所得的局内点
9 pcl::copypointcloud<pointt>(*cloud, inliers, *cloud_in); //复制估算模型的所有局内点到cloud_in中
10 pcl::io::savepcdfile("./data/seg_ran/ransac_building_1.pcd", *cloud_in);
得到:

之后我想迭代的进行面片拟合后分割出来,在索引的地方遇到了问题
于是想出来一个比较笨的办法:
1 for (int i = 0; i < cloud->points.size(); i++)
2 {
3 std::vector<int>::iterator iter = find(inliers.begin(), inliers.end(), i);
4 if (iter == inliers.end())
5 {
6 cloud_out->points.push_back(cloud->points.at(i));
7 }
8 }
等同于自己写了一个分割的方法。
中间遇到的问题有:
点云的索引、有序点云与无序点云的写入、智能指针未实例化问题、
现在仍未搞明白pcl中的索引的使用方法。例如:pointindices、 extractindices 等
如有了解的小伙伴希望告知、互帮互助、共同进步!
2019-04-12 19:04:34
如对本文有疑问,请在下面进行留言讨论,广大热心网友会与你互动!! 点击进行留言回复


如何在没有core文件的情况下用dmesg+addr2line定位段错误
用QT制作3D点云显示器——QtDataVisualization
网友评论